Construya un brazo robótico Dobot cortado y soldado con láser
En este proyecto instructivo, construiremos un brazo Dobot cortado y soldado con láser. El brazo robótico Dobot de alta precisión está compuesto por una estructura de acero 6061 y fabricado mediante CNC. Su precisión mecánica es de 0,02 mm y su precisión de repetición es de 0,2 mm, 50 veces superior a la de un servomotor. Más adelante, les mostraré cómo construir un brazo robótico Dobot básico con más detalles.
Gracias a la alta precisión de Dobot, podemos aplicarlo a la industria. Podemos realizar tareas repetitivas y sencillas, como apretar tornillos y tuercas, y transportar componentes cambiando su efector final. Incluso podemos ensamblar piezas de Lego con este brazo robótico de escritorio de bajo coste.
Todos los archivos de diseño originales se han subido a grabCAD y puedes descargarlos aquí . Estoy optimizando el código Arduino del brazo Dobot y luego lo publicaré en GitHub. He terminado el software para PC de Processing y lo publico en Github .
Puedes hacer algo muy interesante con este Dobot, como el corte por láser (mostrado en el video), además de esta aplicación, el brazo Dobot también se puede usar para impresión 3D (Más detalles) aquí ):
Soldadura con brazo robótico Dobot:
Realice algunos experimentos peligrosos y revuelva la solución con el brazo robótico Dobot:
Muestra algo realmente loco: ¿Puedes creer hacer esto con Dobot?
Dobot también puede enviarte un mensaje de texto, prepararte una taza de café o incluso cocinar algo para ti:
Hacer café:
Preparar el desayuno:
Cortar la salchicha de jamón:
El Dobot de control gestual y el Dobot de Leap Motion cooperan para encender una vela:
Dibuja un Baymax con brazo Dobot:
Si combinas dos o más brazos Dobot, podrías construir una minilínea de producción en tu escritorio. También puedes ver mi otro instructable. Aquí tienes un vídeo promocional del brazo robótico Dobot en Kickstarter. Este proyecto se encuentra en crowdfunding. Más novedades. aquí .
Paso 1: Preparar los materiales
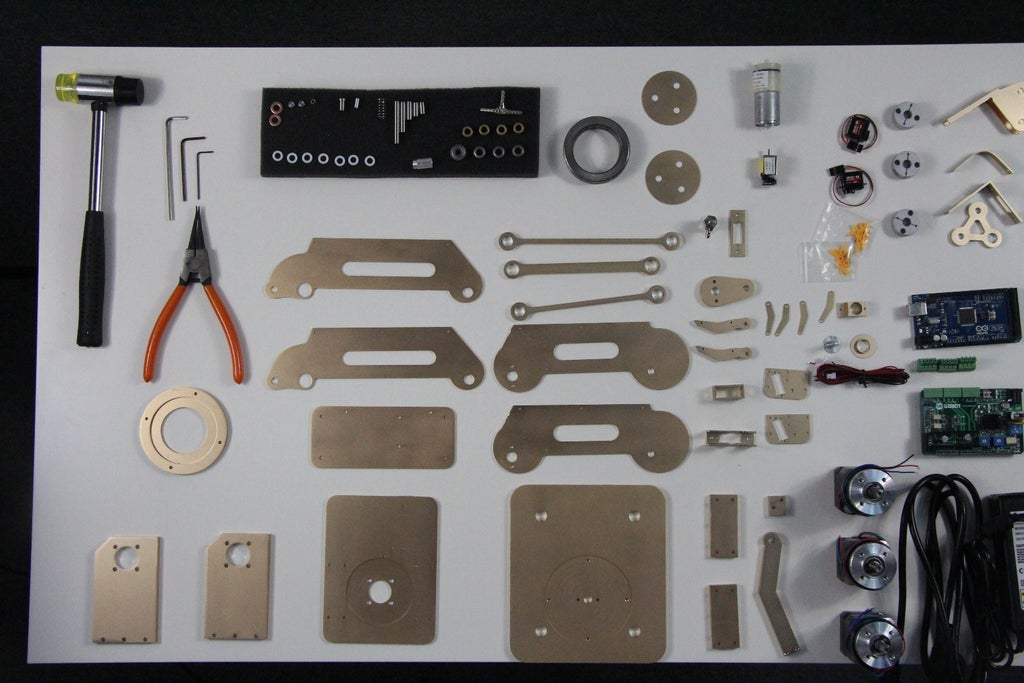
Las imágenes de arriba muestran todos los componentes y herramientas que necesita.
Lista:
- brazo principal
- el eje
- Placa Arduino mega2560
- motores de tres pasos
- Especificación del rodamiento: 6*12*4
- Especificaciones de las juntas de cobre: espesor 1,5 mm.
- Tuerca M3
- Perno M5
- Perno de cabeza hexagonal interior M2*8
- Perno de cabeza hexagonal interior M2,5*12
- Perno de cabeza hexagonal interior M3*10
...
Más detalles en los archivos
Paso 2: Preparar las herramientas

Necesitas preparar las siguientes herramientas:
- Un martillo
- Cuatro llaves Allen, incluidas M4, M3, M5 y M2
- Un poco de pegamento y unos alicates de punta fina que se utilizan para abrir el broche M4.
Paso 3: Agregue los bujes y el cojinete a los tres ejes




Agregue los bujes de cobre 6*10*8 al A eje y agregue los bujes de cobre 6*10*4 al B eje y luego agregue los 6*12*4 cojinetes al do Eje. Tenga cuidado al añadir estos componentes a los ejes. Asegúrese de que el buje y el rodamiento estén perpendiculares a ellos; de lo contrario, el eje quedará torcido. Quizás necesite golpear ligeramente los bujes y rodamientos con un martillo. Después de terminar estas piezas, aplique pegamento a las superficies de contacto entre los ejes y los bujes o rodamientos para evitar deslizamientos.
Paso 4: Conecte los tres ejes con la pieza de enlace triangular



Luego conectamos los tres ejes con la pieza de enlace triangular. Primero, agregamos el eje de φ6*9 mm a la pieza de enlace triangular y el manguito a la pieza de enlace. Tenga cuidado con la dirección del manguito. Segundo, agregamos arandelas de nailon de 0,7 mm al eje. Tercero, agregamos respectivamente... A y B Eje con bujes en la pieza de enlace. Debe tener cuidado con la dirección de ambos ejes. La dirección correcta de los ejes se muestra en la imagen. Luego, usamos dos broches para fijarlos. A y B Eje. Si tiene alguna pregunta, puede ver el diagrama de explosión de Dobot a continuación:
Paso 5: Conecte la pieza de soporte paralela con el eje B



Utilice dos tornillos M3*10 para fijar el bloque pequeño a la parte principal del soporte paralelo. Añada el eje φ6*14 al otro lado. A Eje y le agregamos una arandela de 0,7 mm. Después de terminar esto, agregamos el soporte paralelo al lado derecho y lo fijamos con dos broches.
Paso 6: Conecte la cabeza del brazo con el otro lado de un eje



Primero fijamos la cabeza del brazo con el otro lado de A eje y añadir dos Arandelas de 0,7 mm. Luego colocamos el 6*10*6 Coloque la manga de cobre en la posición correcta y agregue el φ6*18 Eje a través del orificio. ¿Qué significa la posición correcta? Significa que, al mirar el brazo frente a usted, la funda de cobre está entre el lado izquierdo del... A eje y lado derecho de la cabeza del brazo, y las dos arandelas están en el otro lado. Luego las fijamos con dos broches nuevamente.
Paso 7: Ensamblar el brazo pequeño



Primero, coloque el rodamiento de 6x12x4 en el casquillo y luego este en el lado pequeño del brazo pequeño. Segundo, coloque el manguito de cobre de 6x10x4 en el lado grande del brazo pequeño. Asegúrese de que el casquillo sobresalga ligeramente hacia el interior del brazo pequeño y que el otro lado quede horizontal con él. Finalmente, aplique pegamento para fijar el rodamiento y el casquillo.
Paso 8: Ensamble el eje C con el brazo pequeño y la pieza de accionamiento del brazo pequeño



En primer lugar, coloque dos arandelas de 1 mm entre las do Eje y el lateral del brazo pequeño con cojinete. Segundo, inserte el eje φ6*12 a través del orificio y fíjelo con dos broches. Tercero, coloque una arandela de 1 mm entre el eje C y la pieza de accionamiento del brazo pequeño, luego inserte el eje φ6*12 a través del orificio y fíjelo con dos broches. Después de estos pasos, fije el acoplamiento a la pieza de accionamiento del brazo pequeño con dos tornillos M 2.5*10. Ahora, terminamos la parte principal de nuestro brazo Dobot.
Paso 9: Ensamblar el brazo principal con el brazo pequeño y los ejes



Este paso puede ser un poco complicado, por lo que debemos tener cuidado al ensamblar estas piezas.
Primero, usamos dos tornillos M2.5 para fijar el acoplamiento con el brazo principal y asegurarnos de que el acoplamiento esté en el lado izquierdo del brazo principal.
En segundo lugar, fije un broche en el eje φ6*42 y colóquelo en las placas decorativas de abducción del brazo y luego ensámblelo con el brazo principal.
En tercer lugar, coloque dos arandelas de 0,7 mm en el eje y agregue el brazo pequeño izquierdo con el lado del casquillo del cojinete.
En cuarto lugar, agregue la parte de ejes terminada en el paso 6 al eje φ6*42 y asegúrese de que la parte de unión del triángulo con un manguito se conecte con el eje φ6*42.
En quinto lugar, agregue el brazo pequeño con el eje C terminado en el paso 8 al eje φ6*42 y asegúrese de que el manguito esté conectado con el eje y que la parte de accionamiento del brazo pequeño con acoplamiento esté debajo y agregue dos arandelas de 0,7 mm al eje φ6*42 con el brazo pequeño derecho.
En sexto lugar, fije el brazo principal derecho con el eje φ6*42 y luego coloque las placas decorativas de abducción del brazo con el brazo principal y luego apriételas con un broche.
Paso 10: Termine el ensamblaje de la pieza principal



Ahora colocamos los cuatro bloques circulares pequeños de φ6*2 en los agujeros de las placas decorativas de abducción del brazo y los fijamos con pegamento. Después, ensamblamos la cabeza del brazo con el brazo pequeño. Primero, colocamos una arandela de 0,7 mm en los lados izquierdo y derecho de la cabeza del brazo, y luego el eje de φ6*30. Finalmente, usamos dos broches para fijarlos y 32 pilares de cobre y tornillos M3*5 para fijar el brazo principal y el brazo pequeño. Con esto, terminamos de ensamblar la parte principal del brazo Dobot.
Paso 11: Construya la almohadilla base y el motor base




Fije el anillo de la almohadilla del rodamiento y la base del brazo Dobot con 4 tornillos M3 y luego coloque el rodamiento de empuje grande en la almohadilla. Ensamble la almohadilla del motor con el motor paso a paso DB-E02 con 4 tornillos M4*6 y luego fije el acoplamiento al motor paso a paso. Fije el motor paso a paso a la almohadilla de la base con dos tornillos. Es importante tener cuidado con el acoplamiento para asegurar que el motor quede firmemente apretado, de modo que el extremo inferior del acoplamiento quede horizontal con el borde biselado del eje del motor.
Paso 12: Construya el motor de soporte derecho e izquierdo



Ensamble respectivamente los dos motores paso a paso DB-E01 con la almohadilla de soporte derecha e izquierda mediante cuatro tornillos M4*6.
Paso 13: Construye la parte mecánica del brazo Dobot




Ahora, ensamblaremos los motores paso a paso DB-E01 derecho e izquierdo, respectivamente, con el acoplamiento en el brazo principal y la pieza de accionamiento del brazo pequeño, y los fijaremos con dos tornillos M3. Fijamos el soporte del motor a la base con 8 tornillos M4*8. Tras realizar estas tareas, completamos la parte mecánica del brazo Dobot.
Un brazo Dobot puede realizar muchas funciones modificando el efector final. Podemos construir un Dobot para escribir y dibujar, un Dobot para corte láser y CNC, y un Dobot para pintura 3D. Si desea más información o tiene alguna pregunta, no dude en contactarnos. Facebook o Sitio web oficial: http://www.dobot.cc .
Paso 14: Conectar el circuito




Luego de terminar la parte mecánica del brazo Dobot, debemos conectar el circuito de la parte de control de Arduino.
Primero, conecte el shield Dobot al Arduino MEGA2560, como se muestra en la Figura 1.
En segundo lugar, inserte el controlador del motor en las interfaces correspondientes, como se muestra en la imagen de arriba. Tras la inserción, obtendrá un resultado similar al de la imagen de abajo. Preste atención a la dirección de la perilla; no la inserte al revés, ya que podría quemarse después de accionar el motor.
En tercer lugar, inserte los terminales del motor paso a paso. El terminal "Stepper_R" corresponde al motor de accionamiento del brazo grande, "Stepper_L" al motor de accionamiento del brazo pequeño y "Stepper_Rot" a la rotación del motor conectado al chasis. La serigrafía "RBGK" en la placa indica que debe conectarse con los motores "rojo, azul, verde y negro", respectivamente. No intercambie las posiciones de las cuatro líneas, ya que vienen preconfiguradas de fábrica.
En cuarto lugar, inserte el adaptador de corriente de 12 V en el enchufe que se muestra en la Imagen 1 (c), tenga en cuenta que debe conectar el cable de alimentación al terminal del protector anterior, en lugar del terminal Arduino MEGA2560.
Paso 15: Ensamble el cabezal de corte láser.



En este paso, usamos el relé de 5 V para controlar la alimentación del cabezal de corte láser. La primera vez que usamos el cabezal láser de 500 mW, la velocidad de corte era demasiado lenta, por lo que lo reemplazamos por uno de 2 W. La única diferencia entre 500 mW y 2 W es que la alimentación debe cambiarse a 12 V y el relé también. El circuito es idéntico, como se muestra a continuación.
Qué necesitas:
un bloque láser, dos tornillos M2*10, dos tuercas para tornillos M2, un adaptador de corriente para cabezal láser, una fuente de alimentación de 5 V 2 A para cabezal láser, un relé de 5 V, tres líneas Dupont de cabezal hembra y un cabezal láser.
Lo que necesitas hacer:
1. Ensamble el cabezal del láser con el cabezal del brazo: inserte el cabezal del láser en el bloque del láser, asegúrelos con dos tornillos M2*10 y dos tuercas M2.
2. Conecte el circuito: Conecte el positivo de CC del relé a los 5 V del blindaje. Conecte el negativo de CC a la masa del blindaje. Luego, conecte la entrada del relé al puerto de E/S del blindaje y conecte estas tres líneas al Servo_Grab del blindaje mediante una línea DuPont hembra.
3. Conecte la línea negra del cabezal láser con el negativo de la fuente de alimentación de 5 V, y la línea roja del cabezal láser con el positivo de la fuente de alimentación.
4. Conecte el NO con la línea roja del cabezal láser y conecte el COM con la línea azul.
Paso 16: Terminar todo el brazo del Dobot


Ya hemos terminado el proceso de ensamblaje. ¡Disfruta de tu brazo robótico Dobot! El proyecto Dobot ya está en Kickstarter. Se han desarrollado y actualizado más aplicaciones en la página de la campaña. Si quieres actualizar la información, consulta... Actualizaciones de Kickstarter . ¡Gracias por su atención!




























