







Retailers:Elephant Robotics
Elephant Robotics myBuddy 280: Robot colaborativo de 6 grados de libertad, robot de doble brazo, robot de doble brazo
Elephant Robotics myBuddy 280: Robot colaborativo de 6 grados de libertad, robot de doble brazo, robot de doble brazo
Precio habitual
$1,699.00
Precio habitual
$0.00
Precio de oferta
$1,699.00
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
Buy On Elephant Robotics

EL ROBOT DE DOBLE BRAZO MÁS RENTABLE
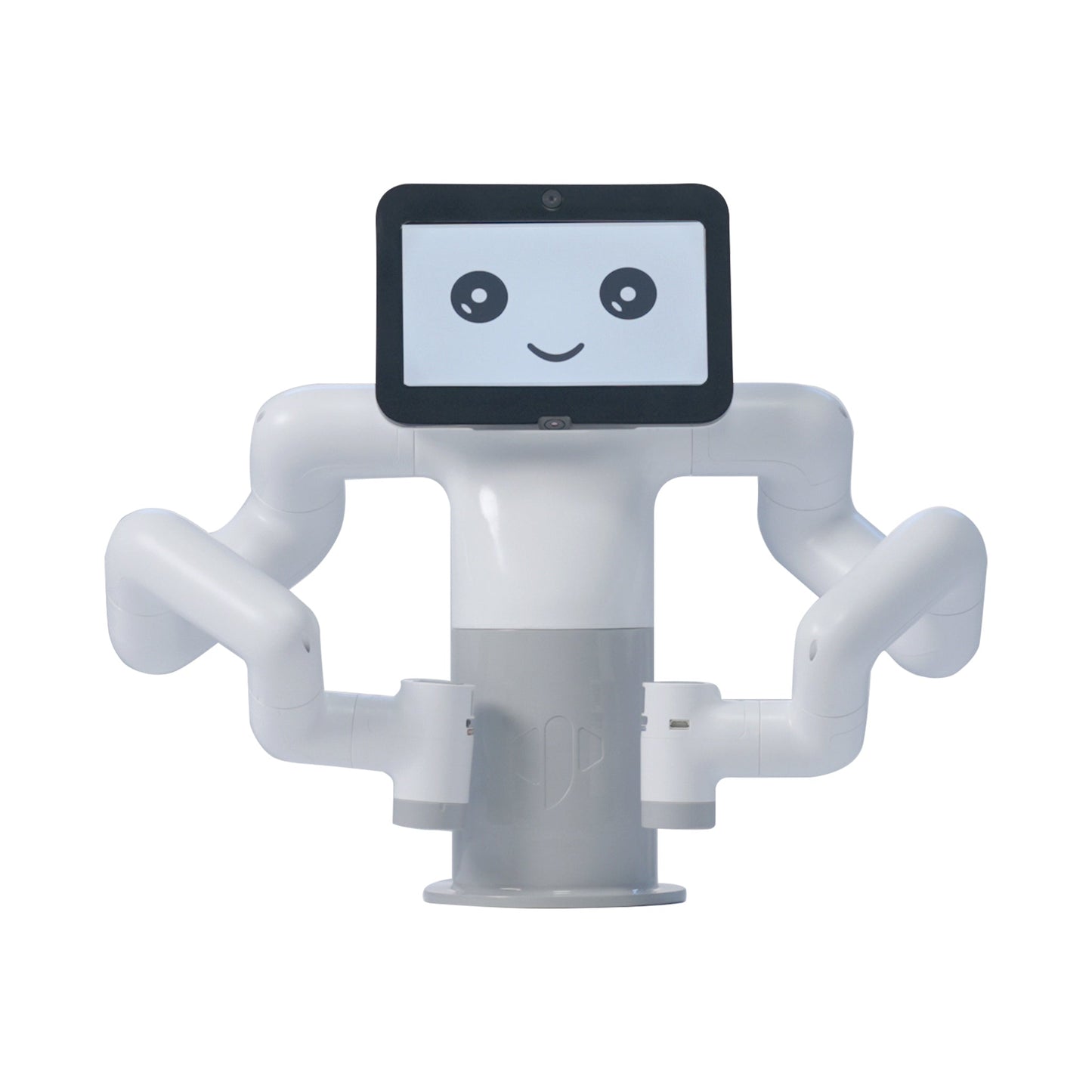
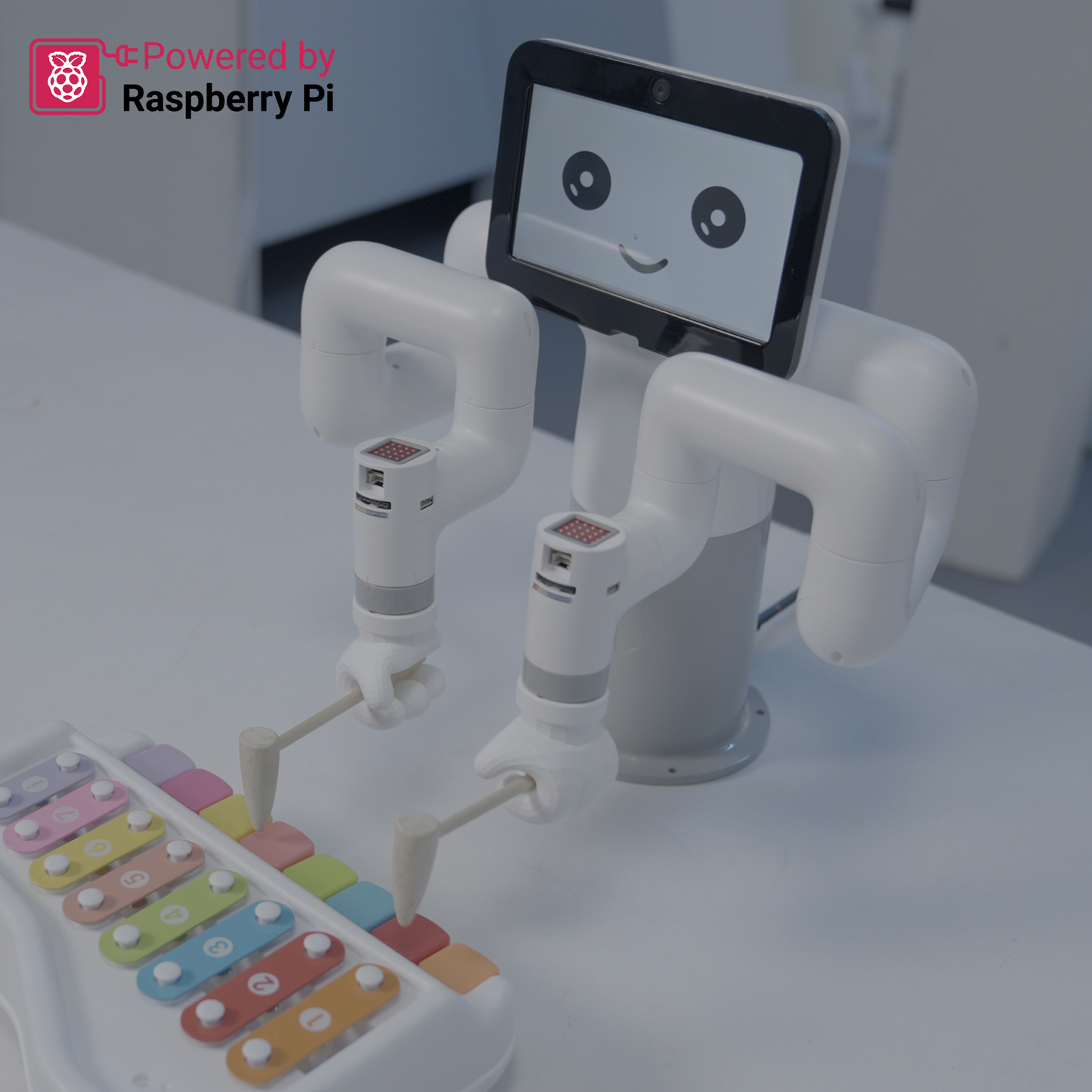
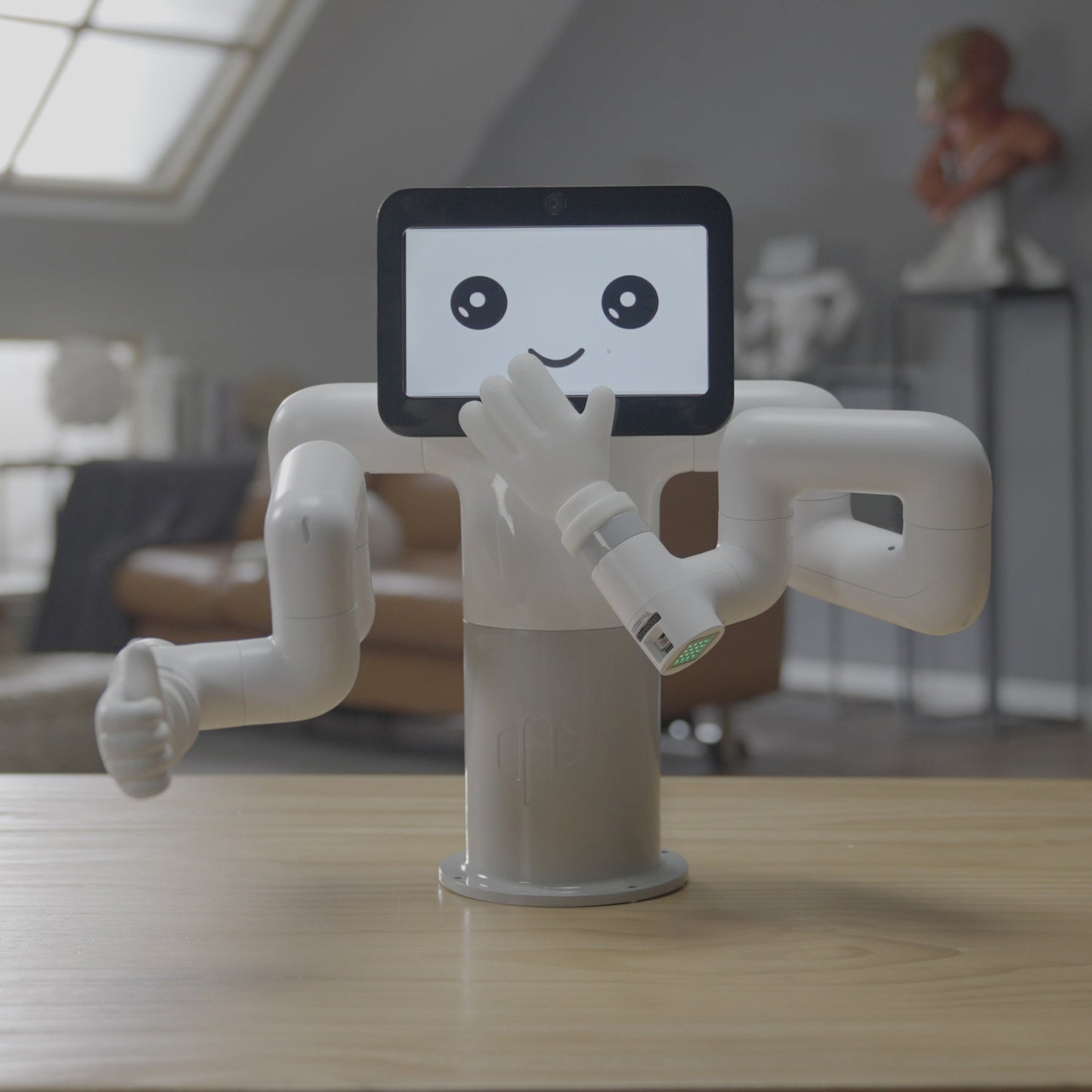
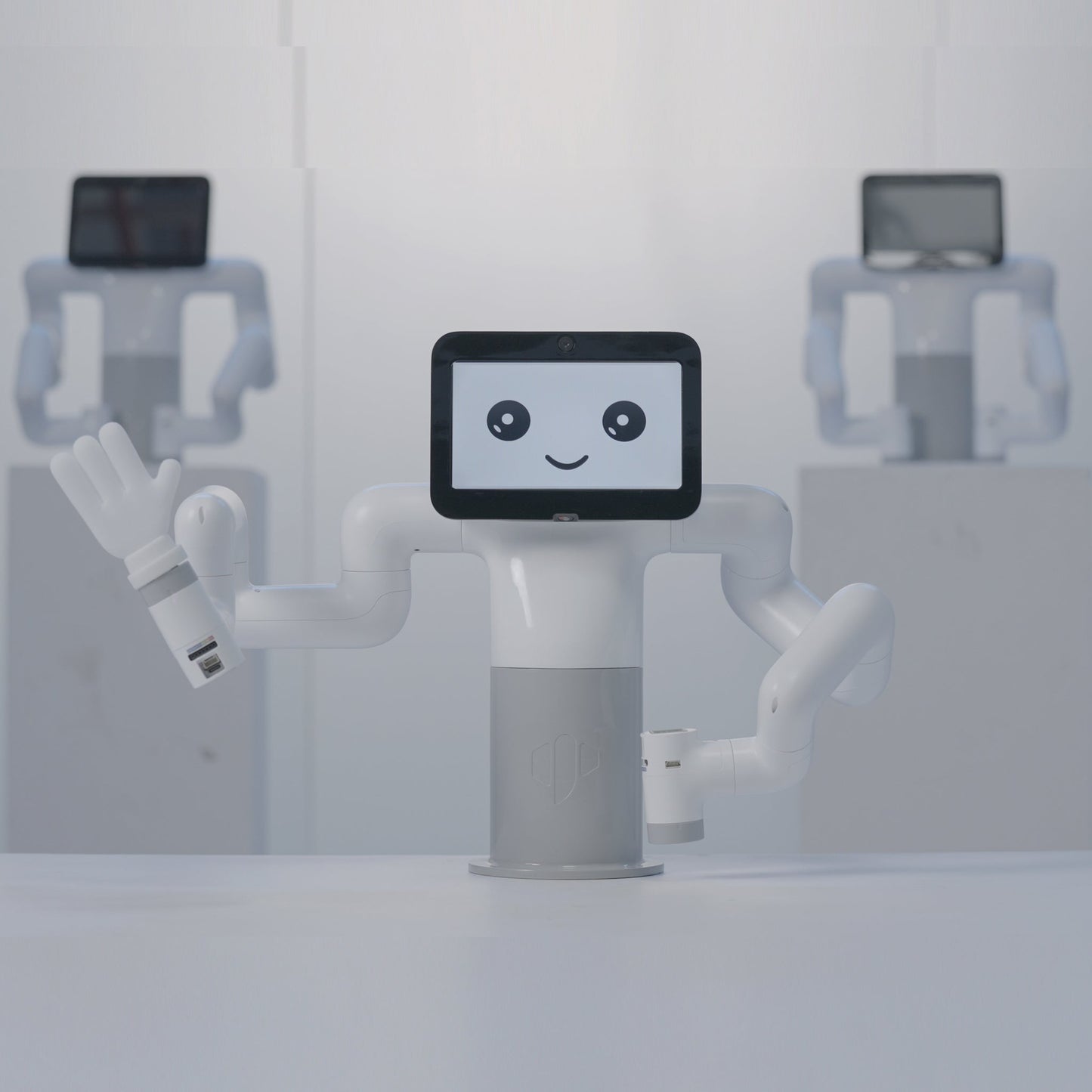
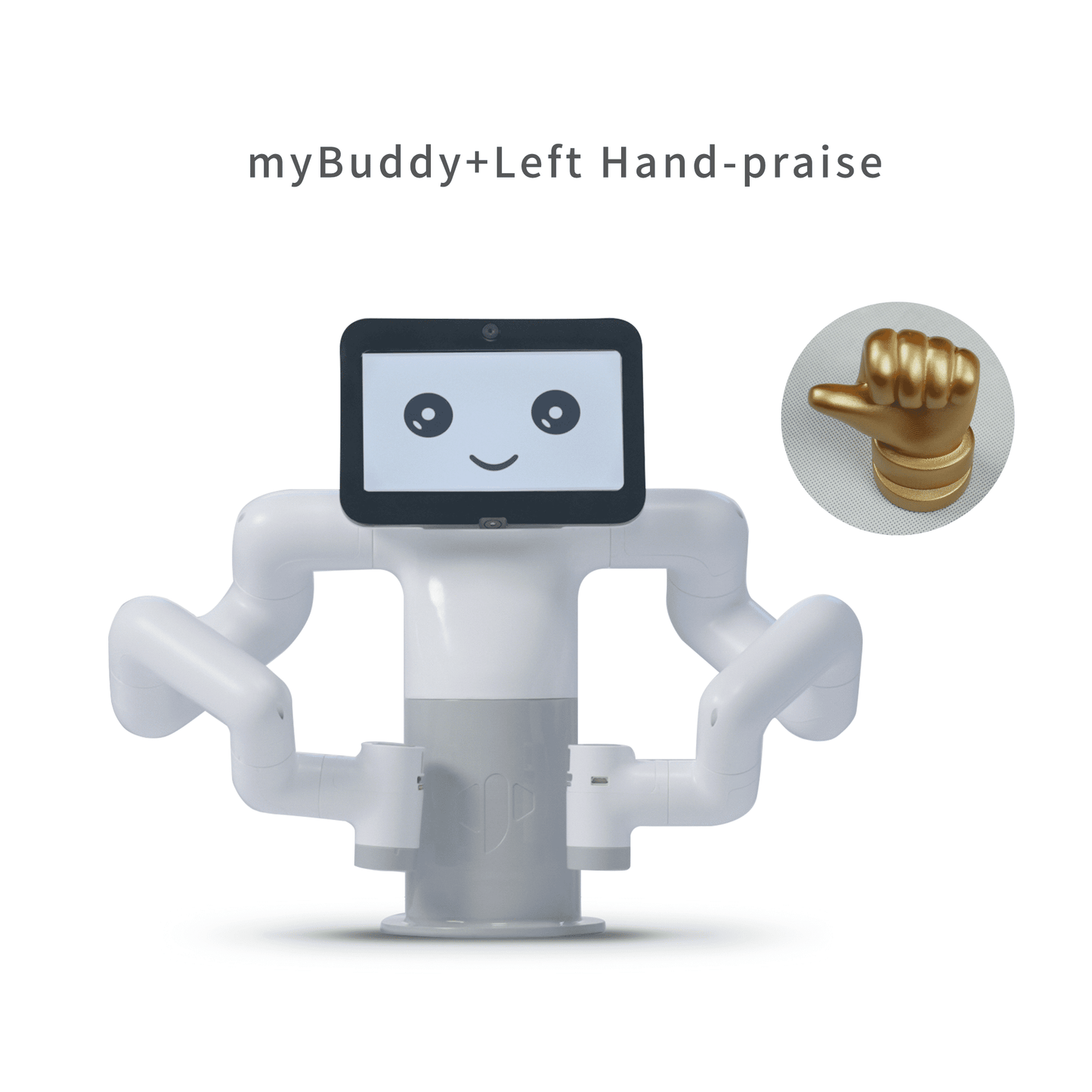
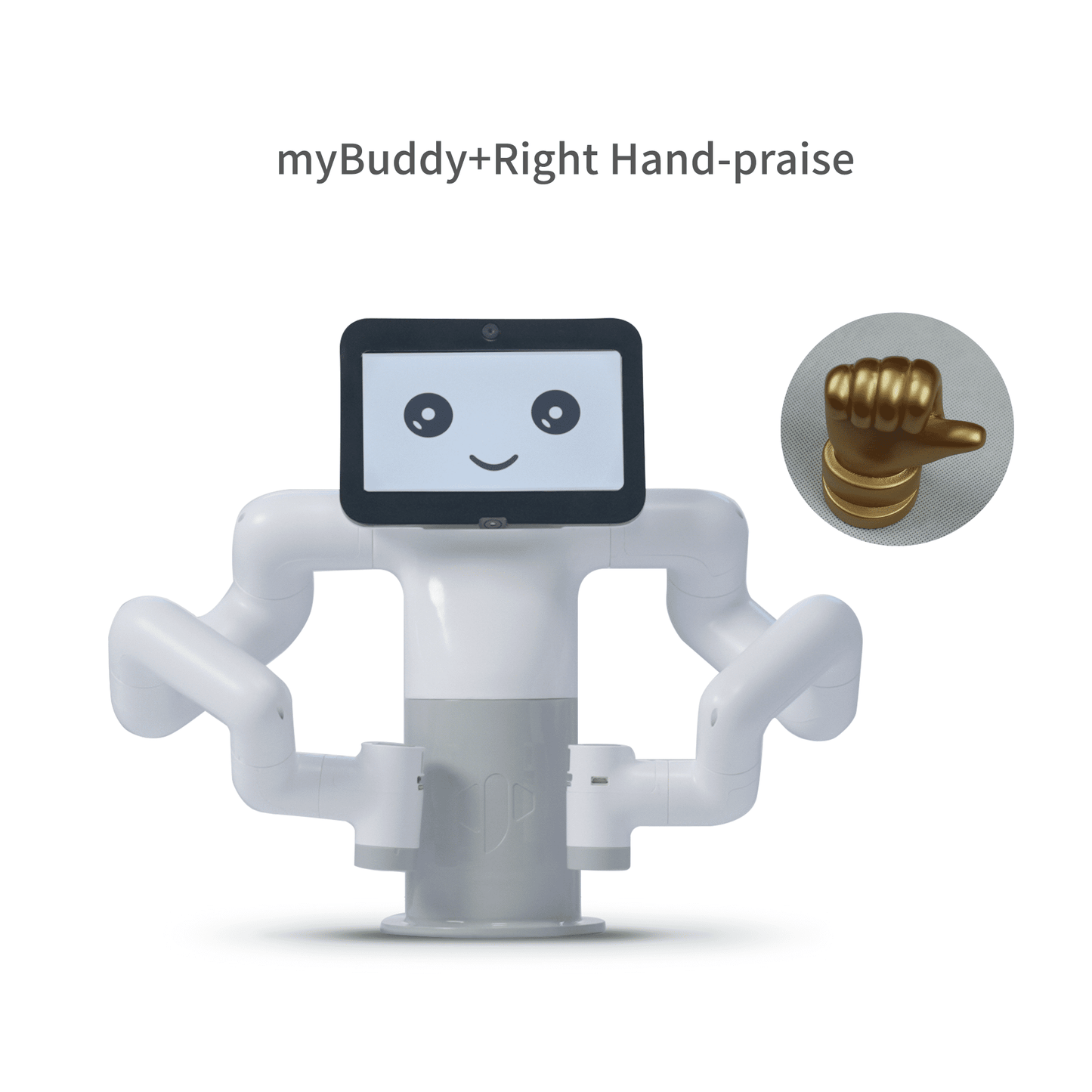
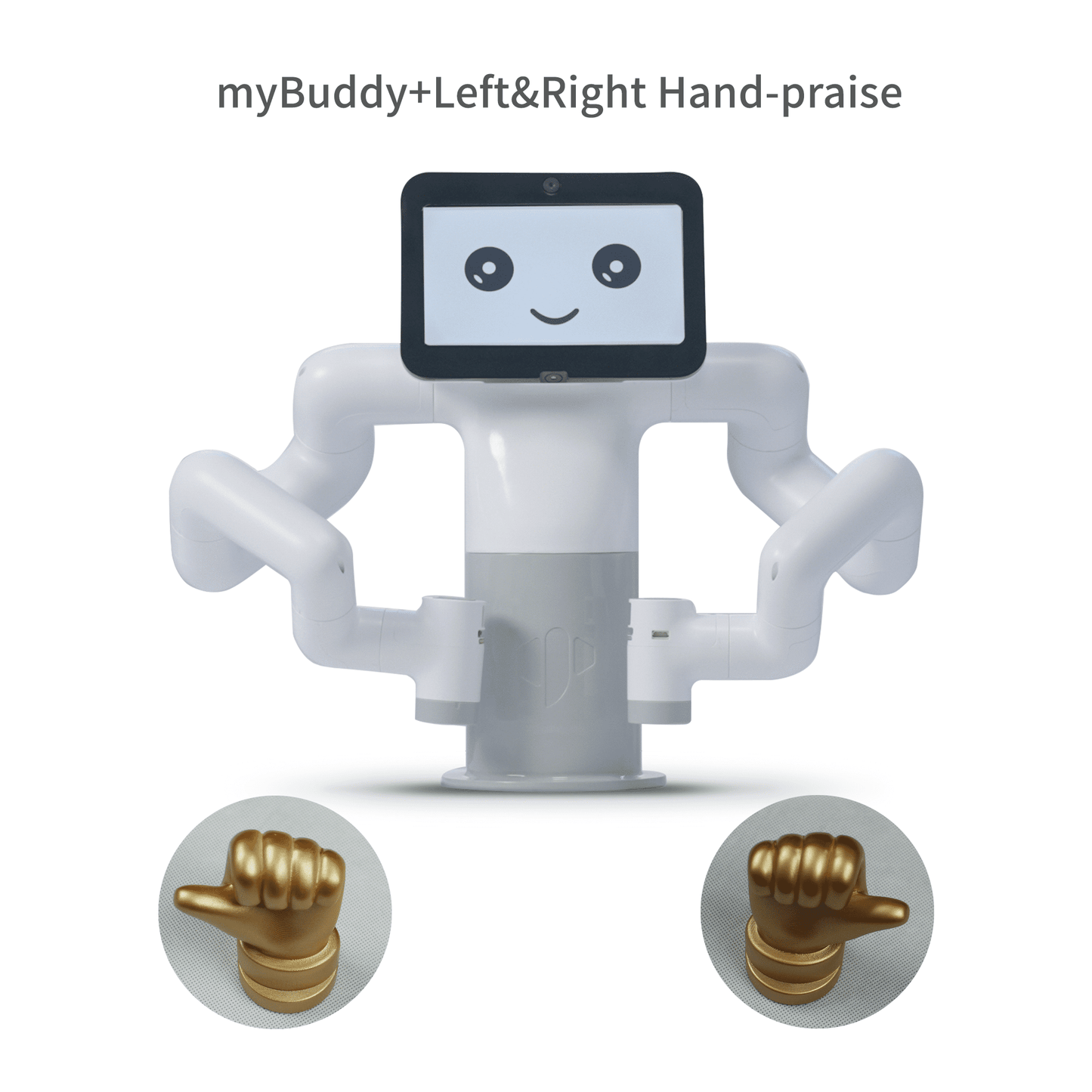
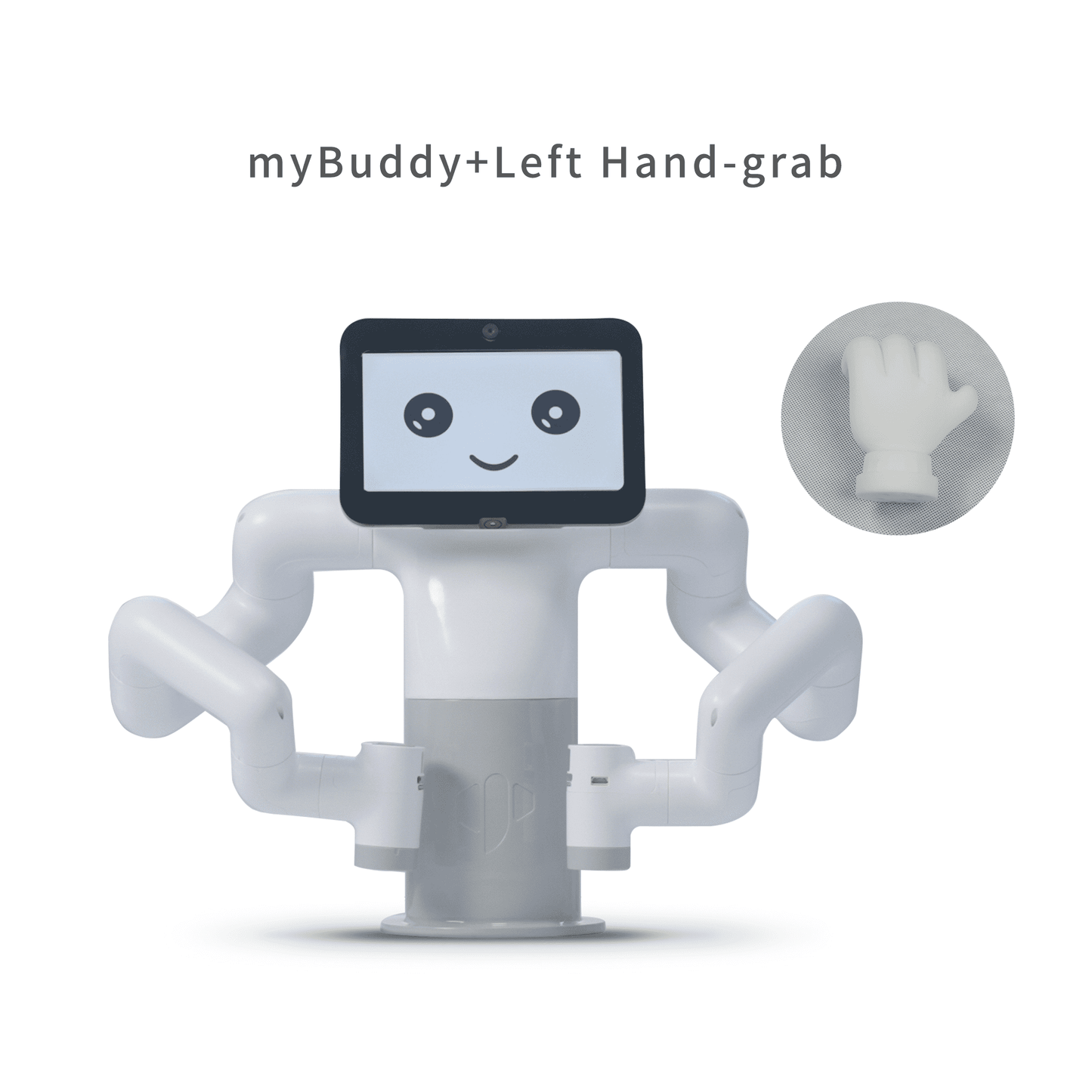
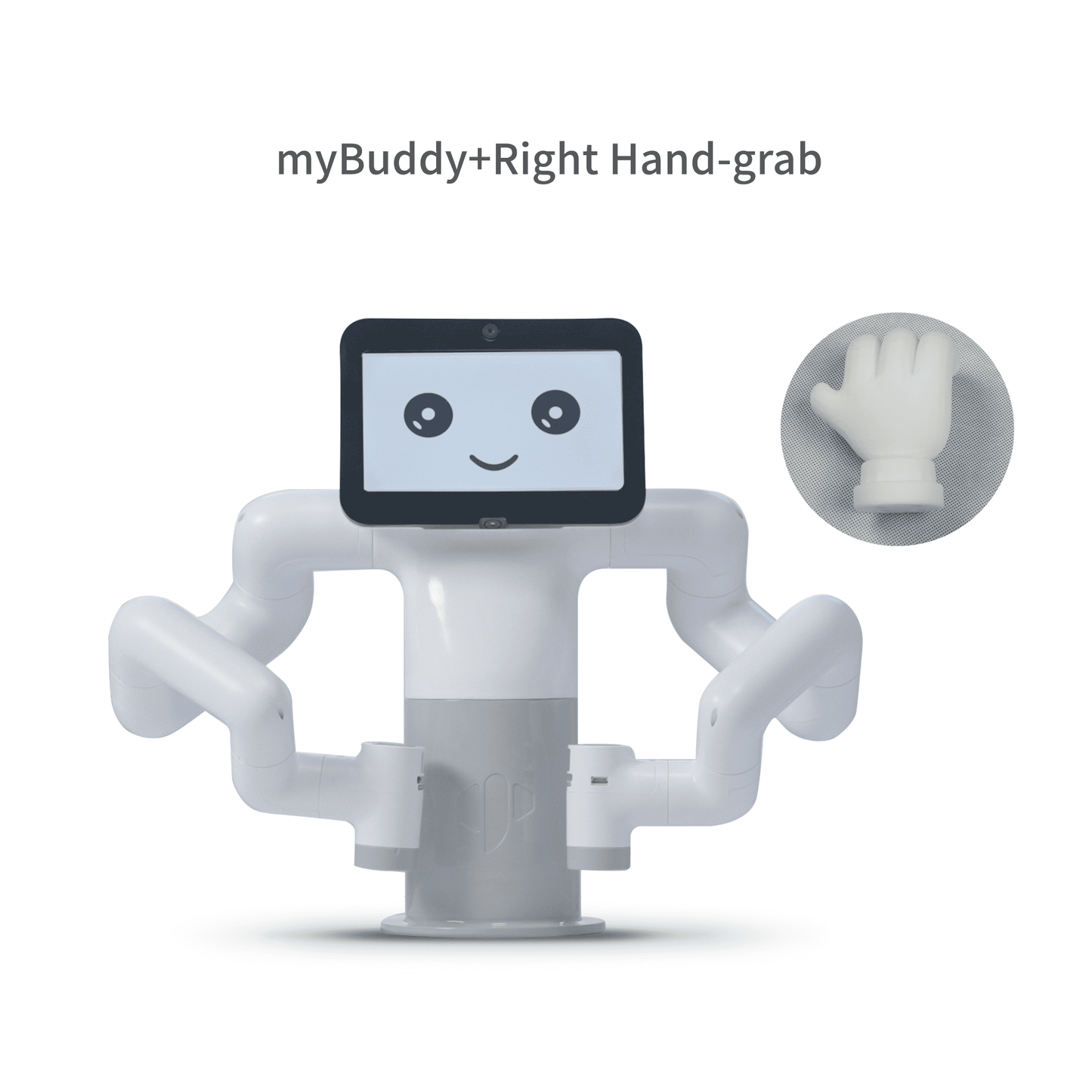
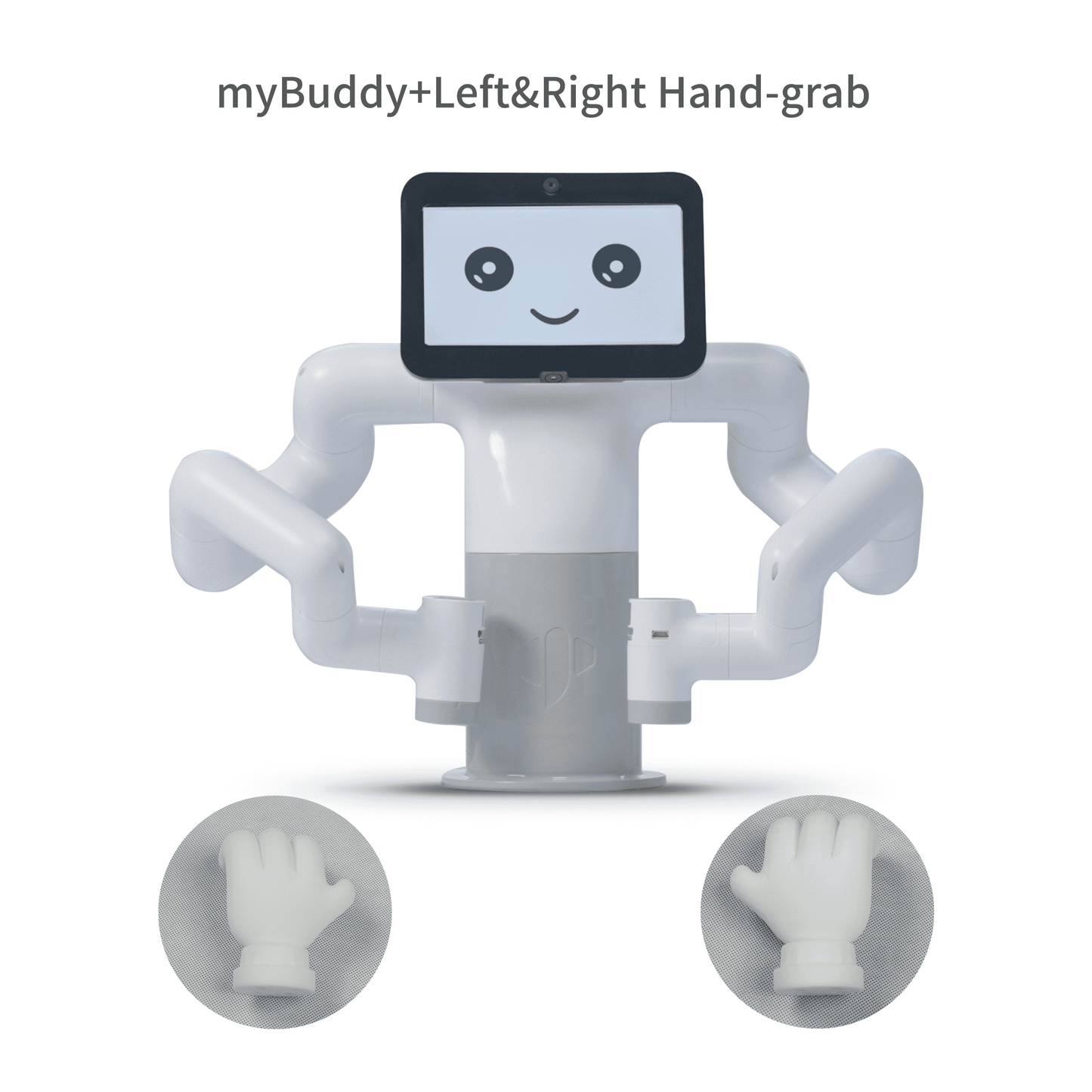
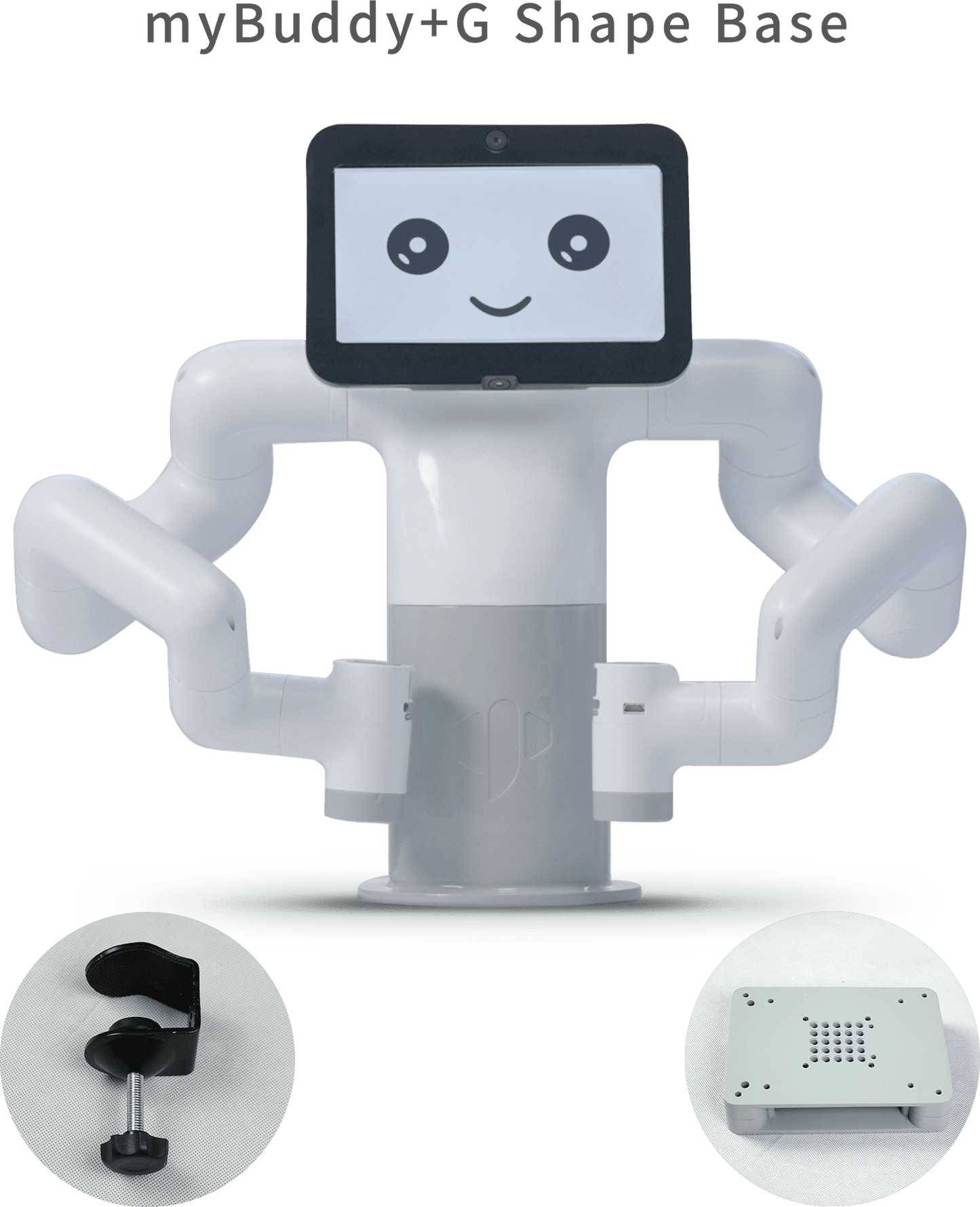
myBuddy es el primer robot de doble brazo de Elephant Robotics, con tecnología Raspberry Pi, perteneciente a la categoría de robots de servicio: un robot colaborativo humanoide de doble brazo y 13 ejes. El radio de acción de cada brazo de myBuddy es de 280 mm y su carga útil máxima es de 250 g. Cuenta con una pantalla interactiva de 7 pulgadas y dos cámaras HD de 2 millones de píxeles, además de puertos de entrada/salida de 3,3 V y puertos Lego. myBuddy es compatible con múltiples accesorios, como bombas de succión, pinzas, etc., lo que permite satisfacer las necesidades de diversas aplicaciones.
ROBOT DE INVESTIGACIÓN Y EDUCACIÓN DE CÓDIGO ABIERTO
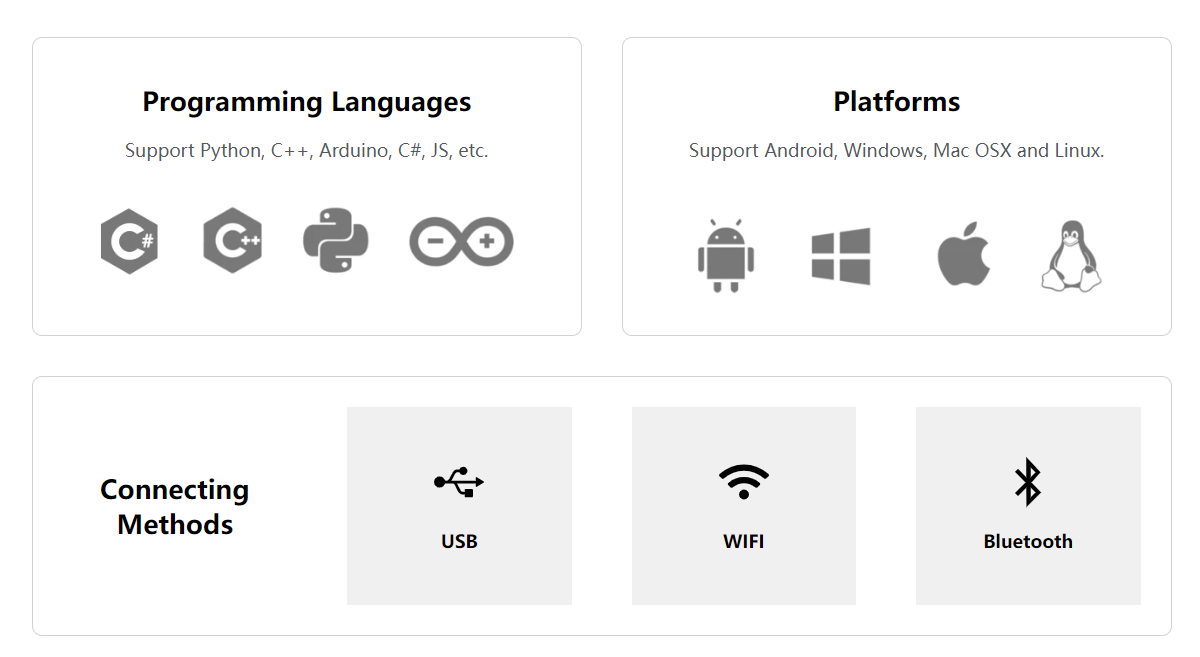
La biblioteca completa de controladores de movimiento de myBuddy es abierta, con más de 100 interfaces de control, como control de ángulo articular, control de coordenadas, etc. Esto permite a los usuarios investigar algoritmos de planificación de trayectorias de movimiento robótico, algoritmos de prevención de interferencias de doble brazo, aprendizaje de visión robótica y otras aplicaciones de inteligencia artificial. myBuddy ayuda eficazmente a desarrolladores y estudiantes a mejorar sus habilidades de investigación científica.


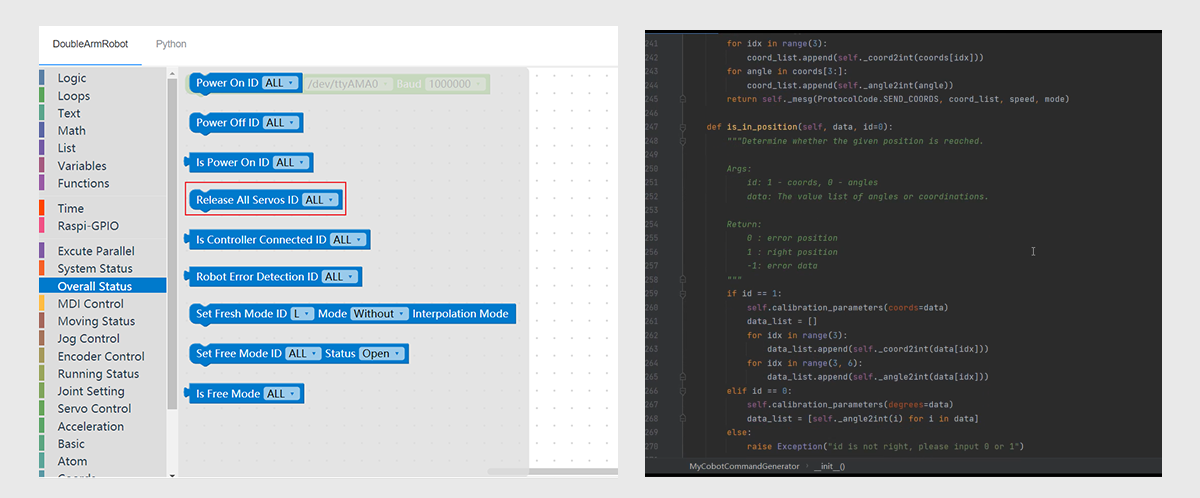
Entorno de desarrollo visual
-
Permite el aprendizaje y la enseñanza de la comprensión de inteligencia artificial. Interfaz de cámara estándar de inteligencia artificial. La cámara de 45 grados inferior permite el posicionamiento de área y el reconocimiento de objetos y códigos QR. Otra cámara permite el reconocimiento facial y corporal.
Viaje creativo para jugadores de Robot
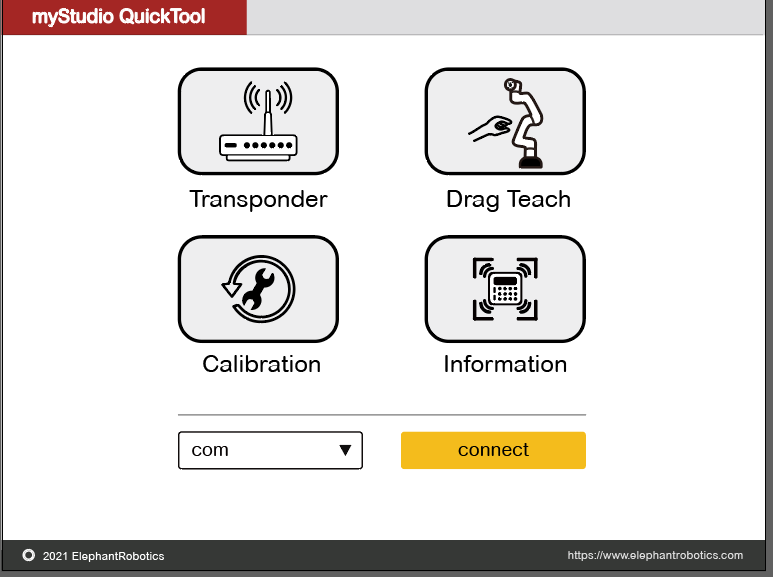
- Interfaz de control inferior abierta. El valor potencial, los ángulos, las coordenadas, la velocidad de carrera y otras interfaces se pueden controlar libremente. Permite la investigación de aplicaciones con robots de doble brazo, la planificación de trayectorias de movimiento, el desarrollo de acciones y el reconocimiento visual. Diversas interfaces permiten satisfacer diversas aplicaciones comerciales y educativas.


Aplicación de aprendizaje ROS
-
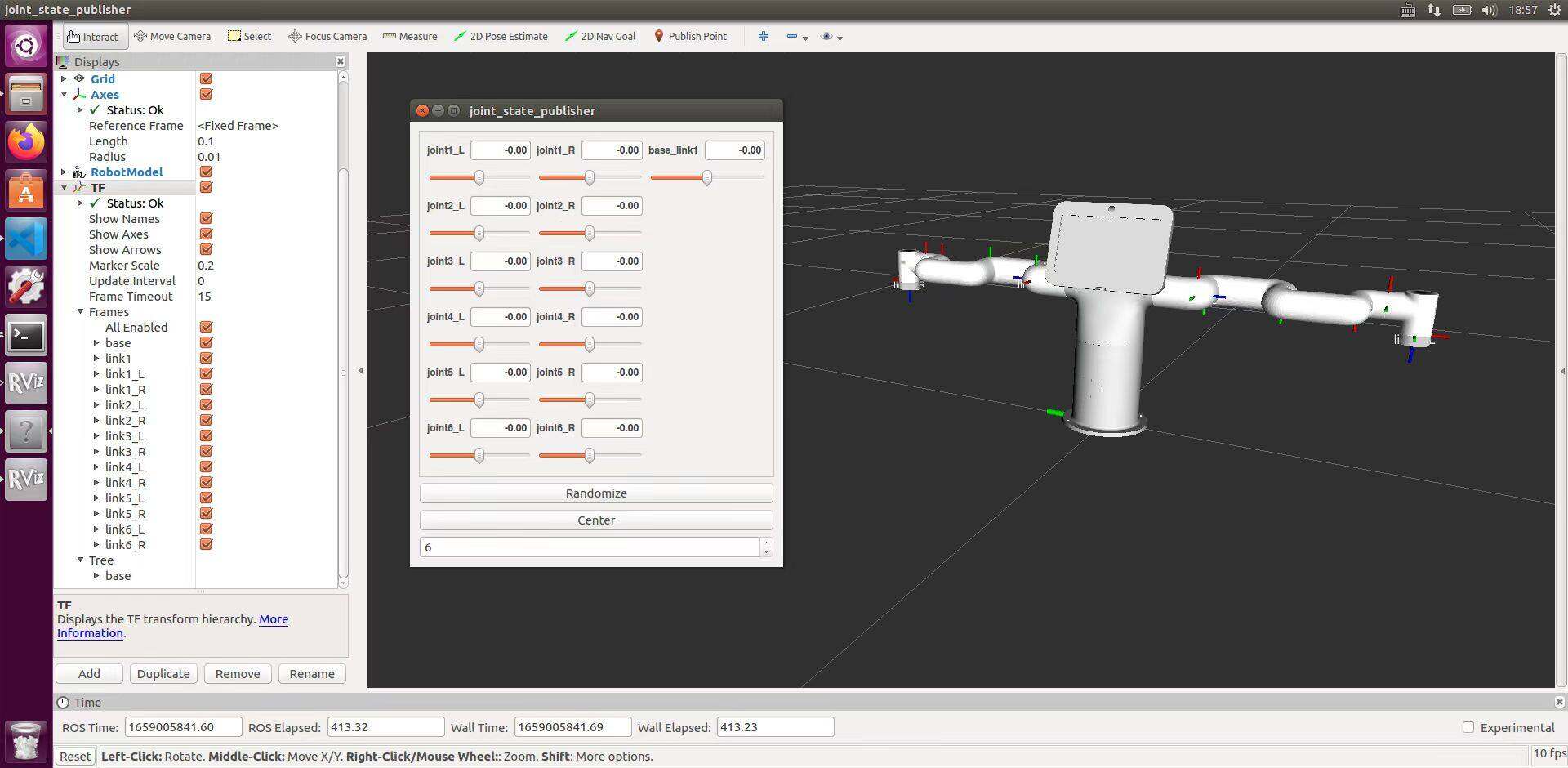
El entorno de desarrollo ROS, integrado en el sistema robótico, ofrece diversas aplicaciones en RVIZ y MOVEIT, como seguimiento móvil, control de deslizadores, planificación de rutas y otras aplicaciones avanzadas. Los documentos de configuración URDF del robot son abiertos, lo que permite a los usuarios realizar modificaciones secundarias.

Desempaquetado de myBuddy 280 Pi
Instrucciones






Let customers speak for us

Excellent fitness tracker, my favorite so far!
So far I love this fitness tracker. I was mainly interested in my sleep and stress level and this is pretty cool to see the data. I was curious how it compared to my apple watch as far as steps, etc and it's surprisingly similar to my watch. The app is super easy to use and customize and I've had no negative issues with it at all. I read some reviews that said the app was problematic but I've had no problems with it. I love how long this stays charged, much easier to use for health tracking than my watch. I keep it on for everything except my shower. I love the choice of bands that came with it, there are three to choose from and they are highly adjustable. I have a fairly small wrist and it cinches up small enough without being bulky. There are a variety of band colors to choose from so this could be worn even with dressy clothes and be minimally noticed if you get a neutrally light colored band. I highly recommend this fitness tracker. It may not be 'medically accurate' but it's a good option to see basic results and have somewhat of a baseline. I've included some of the screen shots of the app options and features, each one of those lines takes you to a specific screen for that feature. All data is displayed in one easy to read page. One of the neatest features is the ability to generate a 'health score report' that is AI generated and extremely detailed. I wish I could include a photo of it but it's personal data so I won't share; just know that it is one of the best features this device has. Again, not a substitute for any medical information or diagnosis; but still very valuable information that I have found to be very accurate for me.

Genuinely light and comfy 24/7 tracker, app little bit cluttered, data seems accurate.
About a week in, mainly using it for sleep, all day activity, and heart rate trends. I used Pixel Watch mainly for sleep and heart rate, as a reference.
What works: it's light enough that I genuinely forget it's on overnight, more than I can say for my Pixel Watch, which always felt awkward to sleep in. Sleep duration and heart rate matched the Watch closely across the week, close enough that I trust the trends. The AI summary is a nice touch, though I'd love charts in a future version, not just text.
Battery: 80% after 1 week use. (I will come back to update)
What doesn't: the app is little bit cluttered overwhelming at first (if you not familiar with Android permissions). A few labels are ambiguous: there's a "Disconnect" button that reads like a status indicator until you tap it and find it's actually an action. I understand some of that is Android's own UI conventions, I expect the UI get more polished further down the road. A tiered easy/intermediate/advanced UI would help. Waiting to see new update :)
Bottom line: solid 4.5 stars. Worth it if you want a sleep friendly screenless tracker and can stomach a busy app on day one.

Outstanding fitness tracker
I’ve been using this fitness tracker for a bit now, and it’s been a great addition to my routine. Setup was quick, and it paired with my phone easily.
The health tracking is impressive for the price—heart rate, sleep, and blood oxygen all provide useful insights for everyday fitness goals. Battery life is a standout, lasting for a really long time!
It’s also lightweight and comfortable enough to wear all day and even while sleeping. Overall, it’s a reliable, feature-packed tracker that offers excellent value without breaking the bank.
Long battery life/well thought out app
Exactly what I want in a fitness tracker and more. I primarily wanted this to track my heart rate during workouts and quality sleep. I cross check this with other trackers and sensors seem to be accurate. I like that it comes with different straps of differing materials. I use the fabric strap most of the time but when working out I use the neoprene/silcone strap so it doesn't absorb sweat.

You will loved it!
I Never regret to choose this. I love how comfortable to wear everyday. Very light. 4days now since I started using it and only 12% of the battery is used. Just download the apps and you will monitor everything there.

Wonderful experience!
VERY impressed with these. the “Hey Cyan” AI assistant is genuinely cool and super helpful. the voice sounds natural and conversational, similar to Alexa or Gemini, and it responds quickly. the photo and video quality is better than expected, and the battery life is insanely good. the AI can describe what you’re looking at and recognize objects, which is really impressive. my only complaint is that the instructions didn’t clearly explain how to add the sunglasses lenses, and there were two different apps listed. i personally preferred the HeyCyan app and found it worked best overall. despite that small confusion, these glasses are extremely impressive. They are a bit heavy but once you're wearing them you tend to even forget that you have them on! color is nice and just black and it's a GREAT value for your money especially in comparison to other brands that do the exact same thing. Comfortable to wear for longer periods of time.
Better than Ray Bans! I should know!
As a guy who is a master at technology, and already BOUGHT & RETURNED the most expensive pair of RAYBANS Smart Glasses, these are amazing! So much better! The light is insanely bright but also can be covered for convenience! Great POV! Slight tilt up and battery pretty good good value for money functions amazingly and has many features! Connectivity comes easy! I connect with my IOS and Android!

Best Feature: Real-Time Translation That Actually Works
These ZekNeo smart glasses arrived faster than expected, and the real-time translation has been the standout part so far. I tested them during a quick chat with someone speaking Spanish, and it picked up both sides of the conversation smoothly, showing the text right in the lens while speaking the translation out loud. It handled casual talk and even some faster dialogue without too much delay, which made things feel natural instead of awkward. The 100+ languages claim seems legit based on what I've tried.
The camera takes solid 4K video and clear 8MP photos with almost no shake, even when I'm walking around outside. Transferring files over WiFi to my phone is quick and easy, so sharing clips or pics doesn't take forever. The open-ear audio sounds surprisingly good for music and calls, and the noise-canceling mics pick up my voice clearly even with some background noise. The photochromic lenses shift tint nicely when I go from indoors to bright sunlight, and they feel comfortable for longer wear without pressing on my nose or ears.
Battery holds up well through a full day of mixed use—music, a few calls, some photos, and translation sessions—and the IP66 rating gives peace of mind if it rains or I get sweaty. They're not the fanciest design, but they're sturdy, lightweight, and practical for everyday stuff. Overall, these have been way more useful than I thought they'd be. 👍🚀

awasume investment
I was suprised how well it fit. How accurate each one of the vitails were. I have an finger O2 moniterdoing, several test were ran to check accuracy. The ring data matched perfectly. I love how easy the app is to useI would definitey recommend this smart ring to otheres
True to size
Love it works wonderful
Love it!
I love this ring! It works great and lets you track your blood pressure as you sleep as well as throughout the day. The sleep tracking is super accurate. Because it's an enamel finish it is very durable and hasn't lost any of its color after several months.
Works great
Bought for my girlfriend and she loves it. The only time she isnt wearing it is when its charging

Great
Great for the price !

Well worth it!
Ok so I have only had this ring for 24 hours, but let me tell you… it is amazing! 🤩 the fit is perfect, it is a little smaller than the normal size of a regular ring so take that in mind. I have been wearing it since I got it, battery hasn’t hardly moved. No it doesn’t connect to Apple health or I imagine androids version of health but it has its own app. This one doesn’t has a subscription fee, it also does almost everything the $400 ring does, tracks blood pressure, heart rate, oxygen, your steps, sleep pattern. I have a problem with low blood pressure, I pass out because of it, this helps me check it before I go do something or while standing so I know to sit before I do. it’s 100% but it was pretty close when we checked against my machine.
Hot Products
-
BKC × ZekNeo Smart Ring,Featuring Stress and Sleep Monitoring Functions, Compatible with iOS and Android,Waterproof Fitness Tracker(No Subscription)
Proveedor:BKCPrecio habitual $19.99Precio habitualPrecio unitario por$49.99Precio de oferta $19.99Oferta -
BKC × ZekNeo Enamel Craft Smart Ring,Fitness Tracker with Heart Rate, SpO2, Blood Pressure & Sleep Monitoring, IP68 Waterproof (No Subscription)
Proveedor:BKCPrecio habitual $29.99Precio habitualPrecio unitario por$79.99Precio de oferta $29.99Oferta -
BKC × ZekNeo Smart Bracelet with 24/7 Activity & Sleep Tracking, Heart Rate, Blood Oxygen, HRV & Stress Monitor, GPS Modes(No Subscription)
Proveedor:BKCPrecio habitual $39.99Precio habitualPrecio unitario por$139.00Precio de oferta $39.99Oferta -
BKC × ZekNeo AI Smart Glasses with 8MP Camera, 1080P Video & HD Photo, Bluetooth Audio, AI Voice Assistant, Real-Time Translation, Object Recognition(No Subscription)
Proveedor:BKCPrecio habitual $69.99Precio habitualPrecio unitario por$199.99Precio de oferta $69.99Oferta








Entradas de blog
Ver todo-

Luna Ring Gen 2 review: Making some waves
A solid—but not groundbreaking—subscription-free smart ring The Noise Luna Ring Gen 2 is a thoroughly solid wearable that hits the high notes of sleep and readiness tracking without the burden...
Luna Ring Gen 2 review: Making some waves
A solid—but not groundbreaking—subscription-free smart ring The Noise Luna Ring Gen 2 is a thoroughly solid wearable that hits the high notes of sleep and readiness tracking without the burden...
-

Polar Loop (Gen 2) review: Lost in the shuffle
A well-built tracker in desperate need of a friendlier app The Polar Loop (Gen 2) is a solid piece of hardware, but it's by no means a straightforward subscription-free alternative...
Polar Loop (Gen 2) review: Lost in the shuffle
A well-built tracker in desperate need of a friendlier app The Polar Loop (Gen 2) is a solid piece of hardware, but it's by no means a straightforward subscription-free alternative...
-

Amazfit T-Rex 3 Pro review: The value adventurer
Premium, trail-ready hardware—with software often lagging behind The Amazfit T-Rex 3 Pro is a hardware triumph that offers an almost unbelievable spec sheet for half the price of a Garmin...
Amazfit T-Rex 3 Pro review: The value adventurer
Premium, trail-ready hardware—with software often lagging behind The Amazfit T-Rex 3 Pro is a hardware triumph that offers an almost unbelievable spec sheet for half the price of a Garmin...



Comprar por categoría
-

BKC estrictamente seleccionado
La plataforma BKC selecciona a los mejores proveedores entre decenas de millones...











BEST SELLERS




