بناء ذراع روبوت Dobot مقطوعة بالليزر ولحامها
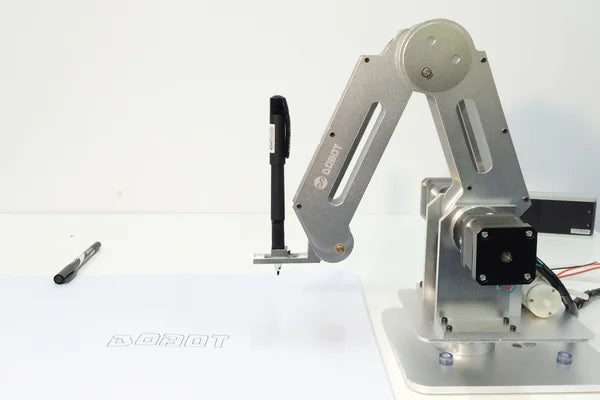
في هذا المشروع التعليمي، سنصنع ذراع روبوت دوبوت مقطوعة بالليزر ومُلحمة. يتكون ذراع الروبوت دوبوت عالي الدقة من إطار 6061 ومُصنع بتقنية التحكم الرقمي بالحاسوب (CNC). تبلغ دقة آلية الذراع 0.02 مم، ودقة التكرار 0.2 مم، أي أفضل بخمسين مرة من دقة السيرفو. سأشرح لكم كيفية صنع ذراع روبوت دوبوت أساسي بمزيد من التفاصيل لاحقًا.
بفضل دقة دوبوت العالية، يُمكننا تطبيقها في الصناعة. يُمكننا القيام ببعض المهام المُتكررة والصعبة، مثل شد البراغي والصواميل، وحمل بعض المكونات بتغيير مُحركها النهائي. كما يُمكننا تجميع مكعبات ليغو والمساعدة في تجميعها باستخدام ذراع الروبوت المكتبي منخفض التكلفة هذا.
تم رفع جميع ملفات التصميم الأصلية على GrabCAD، ويمكنك الحصول عليها هنا . أقوم حاليًا بتحسين شيفرة Arduino لـ Dobot Arm، وسأنشرها لاحقًا على GitHub. انتهيت من برنامج Processing على الكمبيوتر، وسأنشره على جيثب .
يمكنك القيام بشيء رائع للغاية باستخدام هذا الروبوت Dobot، مثل القطع بالليزر (كما هو موضح في الفيديو)، بالإضافة إلى هذا التطبيق، يمكن أيضًا استخدام ذراع الروبوت Dobot للطباعة ثلاثية الأبعاد (مزيد من التفاصيل هنا ):
اللحام باستخدام الذراع الروبوتية Dobot:
قم بإجراء بعض التجارب الخطيرة وحرك المحلول باستخدام ذراع الروبوت Dobot:
أظهر شيئًا مجنونًا حقًا: هل يمكنك تصديق القيام بهذا باستخدام Dobot؟
يمكن لـ Dobot أيضًا إرسال رسالة نصية لك أو إعداد كوب من القهوة أو حتى طهي بعض الطعام لك:
اصنع القهوة:
حضّر وجبة الإفطار:
قطع نقانق لحم الخنزير:
التحكم بالإيماءات يتعاون Dobot و Leap motion Dobot لإشعال شمعة:
ارسم بايماكس بذراع دوبوت:
إذا جمعت ذراعي Dobot أو أكثر، فقد تتمكن من بناء خط إنتاج صغير على سطح مكتبك. يمكنك أيضًا الاطلاع على إرشاداتي الأخرى. هذا يُعرّفكم أكثر على ذراع دوبوت. إليكم فيديو ترويجي لذراع دوبوت الروبوتية على موقع كيك ستارتر، هذا المشروع قيد التمويل الجماعي الآن، المزيد من التحديثات. هنا .
الخطوة 1: تحضير المواد
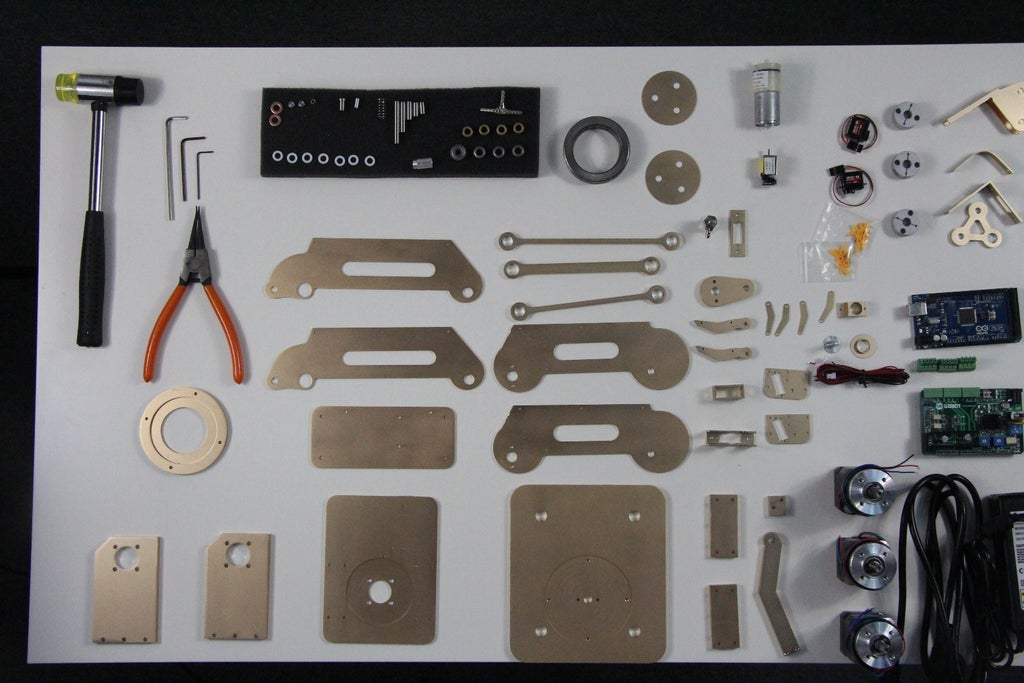
تُظهر الصور أعلاه جميع المكونات والأدوات التي تحتاجها.
قائمة:
- الذراع الرئيسي
- المحور
- لوحة Arduino mega2560
- محركات ثلاثية الخطوات
- مواصفات المحمل: 6*12*4
- مواصفات حشوات النحاس: سمك 1.5 مم
- صامولة M3
- مسمار M5
- مسمار برأس سداسي داخلي M2*8
- مسمار برأس سداسي داخلي M2.5*12
- مسمار برأس سداسي داخلي M3*10
...
مزيد من التفاصيل في الملفات
الخطوة 2: تحضير الأدوات

يجب عليك تحضير الأدوات التالية:
- مطرقة
- أربعة مفاتيح ألين بما في ذلك M4 وM3 وM5 وM2
- بعض الغراء وزردية ذات أنف إبرة تستخدم لفتح القفل M4
الخطوة 3: إضافة البطانات والمحمل إلى المحاور الثلاثة




أضف البطانات النحاسية مقاس 6*10*8 إلى أ المحور وأضف البطانات النحاسية 6*10*4 إلى ب المحور ثم أضف المحامل 6*12*4 إلى ج المحور. توخَّ الحذر عند إضافة هذه المكونات إلى المحاور، تأكد من أن الجلبة والمحمل عموديان على المحاور، وإلا ستحصل على محور غير متناسق مع الجلبة. قد تحتاج إلى استخدام مطرقة لطرق الجلبة والمحامل قليلاً. بعد الانتهاء من هذه الأجزاء، أضف بعض الغراء على أسطح التلامس بين المحاور والجلبة أو المحامل لضمان عدم انزلاقها.
الخطوة 4: ربط المحاور الثلاثة بجزء ربط المثلث



ثم نوصل المحاور الثلاثة بجزء الربط المثلث. أولًا، نضيف محور φ6*9 مم إلى جزء الربط المثلث، ثم نضيف الغلاف إلى جزء الربط. يجب الانتباه إلى اتجاه الغلاف. ثانيًا، نضيف غسالات نايلون بقطر 0.7 مم إلى المحور. ثالثًا، نضيف على التوالي أ و ب المحور مع البطانات إلى جزء الربط، ويجب الانتباه لاتجاه المحورين. يظهر الاتجاه الصحيح للمحورين في الصورة. ثم استخدمنا مشابك تثبيت لتثبيت المحورين. أ و ب المحور. إذا كانت لديك أي أسئلة، يمكنك مشاهدة مخطط انفجار دوبوت أدناه:
الخطوة 5: قم بتوصيل جزء الدعم الموازي بالمحور B



استخدم برغيين M3*10 لتثبيت الكتلة الصغيرة بالجزء الرئيسي من الدعامة الموازية. أضف المحور φ6*14 إلى الجانب الآخر من أ المحور، وأضف إليه حلقة بقطر ٠٫٧ مم. بعد الانتهاء، أضف الدعامة الموازية على الجانب الأيمن، ثم استخدمنا مشبكين لتثبيتها.
الخطوة 6: قم بتوصيل رأس الذراع بالجانب الآخر من المحور



أولاً، قمنا بضبط رأس الذراع مع الجانب الآخر من أ المحور وإضافة اثنين غسالات 0.7 مم فيه. ثم نضع 6*10*6 كم النحاس في الموضع الصحيح وأضف φ6*18 المحور عبر الثقب. ماذا يعني الوضع الصحيح؟ يعني أنه عند النظر إلى الذراع أمامك، يكون الغلاف النحاسي بين الجانب الأيسر من أ المحور والجانب الأيمن لرأس الذراع، والغسالتان في الجانب الآخر. ثم نقوم بإصلاحهما بمشبكين مرة أخرى.
الخطوة 7: تجميع الذراع الصغيرة



أولاً، أضف المحمل 6*12*4 إلى جلبة المحمل، ثم أضف جلبة المحمل إلى الجانب الصغير من الذراع الصغير. ثانياً، أضف غلاف النحاس 6*10*4 إلى الجانب الكبير من الذراع الصغير، مع مراعاة أن تكون جلبة المحمل بارزة قليلاً في الجانب الداخلي للذراع الصغير، وأن يكون الجانب الآخر أفقياً معه. وأخيراً، ضع بعض الغراء لتثبيت المحمل وجلبة المحمل.
الخطوة 8: تجميع المحور C باستخدام الذراع الصغيرة وجزء محرك الذراع الصغيرة



أولاً، ضع غسالتين بقطر 1 مم بين ج المحور C وجانب الذراع الصغير مع جلبة المحمل. ثانيًا، مرر المحور φ6*12 عبر الفتحة، ثم ثبّته بكبّاسين. ثالثًا، ضع حلقة 1 مم بين المحور C وجزء محرك الذراع الصغير، ثم مرر المحور φ6*12 عبر الفتحة، وثبّته بكبّاسين. بعد الانتهاء من هذه الخطوات، يجب تثبيت الوصلة مع جزء محرك الذراع الصغير ببرغيين M 2.5*10. الآن، انتهينا من الجزء الرئيسي لذراع Dobot.
الخطوة 9: تجميع الذراع الرئيسي مع الذراع الصغير والفؤوس



قد تكون هذه الخطوة معقدة بعض الشيء، لذا يجب أن نكون حذرين عند تجميع هذه الأجزاء.
أولاً، نستخدم برغيين M2.5 لتثبيت الوصلة مع الذراع الرئيسي والتأكد من أن الوصلة موجودة على الجانب الأيسر من الذراع الرئيسي.
ثانيًا، قم بتثبيت القفل على المحور φ6*42 ووضعه في لوحات الزخرفة الخاصة باختطاف الذراع ثم قم بتجميعه مع الذراع الرئيسي.
ثالثًا، ضع غسالتي 0.7 مم على المحور وأضف الذراع الصغيرة اليسرى مع جانب جلبة المحمل إليها.
رابعًا، أضف جزء المحاور النهائي في الخطوة 6 إلى المحور φ6*42 وتأكد من أن جزء الربط المثلثي مع الغلاف متصل بالمحور φ6*42.
خامسًا، أضف الذراع الصغيرة ذات المحور C المكتمل في الخطوة 8 إلى المحور φ6*42 وتأكد من اتصال الغلاف بالمحور وأن جزء محرك الذراع الصغيرة مع الوصلة موجود في الأسفل وأضف غسالتين مقاس 0.7 مم إلى المحور φ6*42 باستخدام الذراع الصغيرة اليمنى.
سادسًا، قم بتثبيت الذراع الرئيسي الأيمن باستخدام المحور φ6*42 ثم ضع لوحات الزخرفة الخاصة باختطاف الذراع مع الذراع الرئيسي ثم قم بإحكامها باستخدام مشبك.
الخطوة 10: الانتهاء من تجميع الجزء الرئيسي



الآن، وضعنا الكتل الدائرية الصغيرة الأربعة φ6*2 في فتحات ألواح الزخرفة الخاصة بذراع الرفع، ثم أضفنا بعض الغراء لتثبيتها. بعد الانتهاء، سنجمع رأس الذراع مع الذراع الصغير. أولًا، وضعنا حلقة بقطر 0.7 مم في الجانبين الأيمن والأيسر من رأس الذراع، ثم ركّبنا محور φ6*30. أخيرًا، استخدمنا مشبكين لتثبيتهما، واستخدمنا أعمدة نحاسية مقاس 32 بوصة وبراغي M3*5 لتثبيت الذراع الرئيسي والذراع الصغير، وبذلك نكون قد انتهينا من تجميع الجزء الرئيسي من ذراع Dobot.
الخطوة 11: بناء لوحة القاعدة والمحرك الأساسي




ثبّت حلقة وسادة المحمل وقاعدة ذراع دوبوت بأربعة براغي M3، ثم ثبّت محمل الدفع الكبير على الوسادة. ركّب وسادة المحرك مع محرك الخطو DB-E02 باستخدام أربعة براغي M4*6، ثم ثبّت الوصلة مع محرك الخطو. ثبّت محرك الخطو مع وسادة القاعدة ببرغيين. يجب توخي الحذر عند استخدام الوصلة لضمان ثبات المحرك، بحيث يكون الطرف السفلي من الوصلة أفقيًا مع الحافة المشطوفة لعمود المحرك.
الخطوة 12: بناء محرك الدعم الأيمن والأيسر



قم بتجميع محركي الخطوة DB-E01 على التوالي مع لوحة الدعم اليمنى واليسرى باستخدام أربعة براغي M4*6.
الخطوة 13: بناء الجزء الميكانيكي من ذراع Dobot




الآن، لنُجمّع محركي الخطو DB-E01 الأيمن والأيسر على التوالي، مع وصلة الذراع الرئيسي وجزء محرك الذراع الصغير، ونُثبّتهما ببرغيين M3. نُثبّت دعامة المحرك مع الجزء الأساسي بثمانية براغي M4*8. بعد الانتهاء من هذه الأعمال، نُكمل الجزء الميكانيكي لذراع Dobot.
يمكن لذراع دوبوت القيام بالعديد من المهام عن طريق تغيير المؤثر النهائي. يمكننا تصنيع ذراع دوبوت للكتابة والرسم، وذراع دوبوت للقطع بالليزر والطباعة ثلاثية الأبعاد. لمزيد من التفاصيل أو لأي استفسار، تواصل معنا على فيسبوك أو الموقع الرسمي: http://www.dobot.cc .
الخطوة 14: توصيل الدائرة




بعد الانتهاء من الجزء الميكانيكي لذراع Dobot، يجب علينا توصيل دائرة جزء التحكم Arduino.
أولاً، قم بتوصيل درع Dobot بـ Arduino MEGA2560، كما هو موضح في الشكل 1.
ثانيًا، أدخل محرك الأقراص في الواجهات المقابلة كما هو موضح في الصورة أعلاه. بعد الإدخال، ستحصل على ما يشبه الصورة أدناه. انتبه لاتجاه المقبض، ولا تُدخله عكسيًا، وإلا سيحترق بعد تشغيل المحرك.
ثالثًا، أدخل أطراف توصيل محرك السائر. الطرف "Steppter_R" مخصص لمحرك الذراع الكبير، والطرف "Stepper_L" مخصص لمحرك الذراع الصغير، والطرف "Stepper_Rot" مخصص لدوران المحرك المتصل بالهيكل. يشير رمز "RBGK" إلى التوصيل بالمحرك "أحمر، أزرق، أخضر، أسود" على التوالي. لا تُبدّل مواضع الخطوط الأربعة لأنها مُعدّة مسبقًا في المصنع.
رابعًا، أدخل محول الطاقة 12 فولت في المقبس الموضح في الصورة 1 (ج)، وكن على دراية بأنك بحاجة إلى توصيل سلك الطاقة بطرف الدرع أعلاه، بدلاً من طرف Arduino MEGA2560.
الخطوة 15: تجميع رأس القطع بالليزر.



في هذه الخطوة، نستخدم مُرحّل 5 فولت للتحكم في مصدر طاقة رأس القطع بالليزر. في المرة الأولى التي استخدمنا فيها رأس الليزر 500 مللي واط، وجدنا أن سرعة القطع بطيئة جدًا، فاستبدلناه برأس ليزر 2 واط. الفرق الوحيد بين 500 مللي واط و2 واط هو ضرورة تغيير مصدر الطاقة إلى 12 فولت، وكذلك تغيير المُرحّل. جميع الدوائر متشابهة كما هو موضح أدناه.
ماذا تحتاج:
كتلة ليزر، برغيين M2*10، صامولتين M2، محول طاقة لرأس الليزر، مصدر طاقة 5 فولت 2 أمبير لرأس الليزر، مرحل 5 فولت، ثلاثة خطوط Dupont برأس أنثوي ورأس ليزر.
ما عليك فعله:
1. قم بتجميع رأس الليزر مع رأس الذراع: أدخل رأس الليزر في كتلة الليزر، وقم بتأمينهما باستخدام اثنين من البراغي M2*10 واثنين من صواميل البراغي M2.
٢. توصيل الدائرة: وصّل التيار المستمر الموجب (+) للمرحل بجهد ٥ فولت للدرع، ثم وصّل التيار المستمر السالب (-) بمنفذ الأرضي (GND) للدرع. ثم وصّل مدخل المرحل بمنفذ الإدخال والإخراج للدرع، وصّل هذه الخطوط الثلاثة بمنفذ Servo_Grab للدرع بواسطة سلك دوبونت أنثى.
3. قم بتوصيل الخط الأسود لرأس الليزر بالطرف السالب لمصدر الطاقة 5 فولت، والخط الأحمر لرأس الليزر بالطرف الموجب لمصدر الطاقة.
4. قم بتوصيل NO بالخط الأحمر لرأس الليزر وقم بتوصيل COM بالخط الأزرق.
الخطوة 16: الانتهاء من ذراع Dobot بالكامل


انتهينا الآن من عملية التجميع. استمتع بذراع روبوت دوبوت! مشروع دوبوت متاح الآن على كيك ستارتر، وقد طُوّرت تطبيقات جديدة وحُدّثت على صفحة الحملة. إذا كنت ترغب في تحديث المعلومات، يُرجى الانتباه إلى... تحديثات كيك ستارتر . شكرًا لاهتمامكم!




























